架构

- Arranger由Scheduler和Controller两部分组成:
Controller负责对CRD API资源进行合法性校验,管理CRD(TYJob)的生命周期,创建和删除资源。
Scheduler是一个周期性调度器,会将周期内的job依策略排序,按顺序对其中的任务进行调度,并支持多种调度算法。
API
Arranger针对TYRL的结构设计了自定义资源TYJob, Leader对应TYRL中的Learner,Worker则对应Actor,WorkerSet是一类启动参数的Actor的集合。 .. image:: images/TYJob结构.png
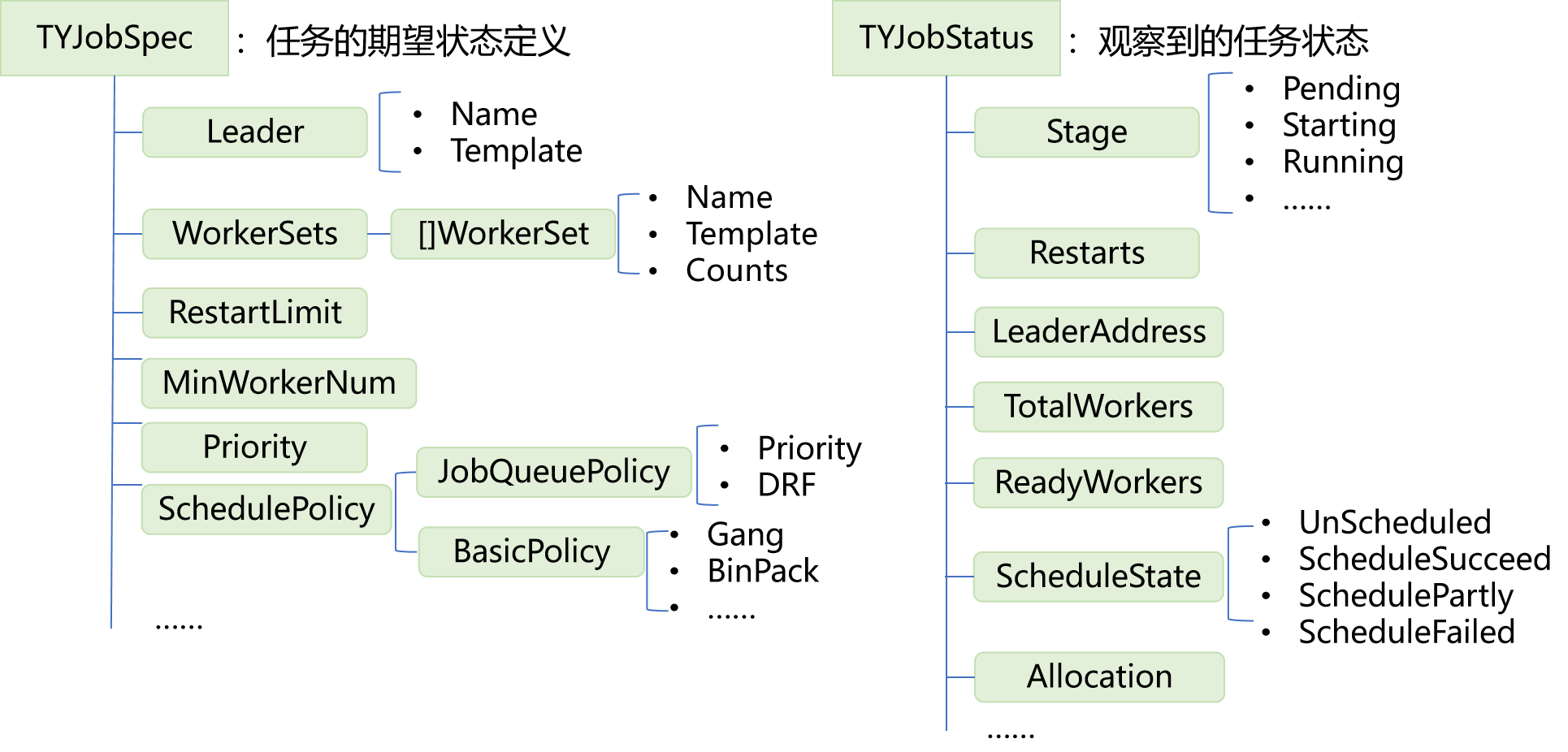
TYJobSpec定义了任务的期望状态,各字段及其含义如下:
type TYJobSpec struct {
// INSERT ADDITIONAL SPEC FIELDS - desired state of cluster
// Important: Run "make" to regenerate code after modifying this file
// RestartLimit defines the restart limit for Leader and WorkerSet
// +kubebuilder:default=3
RestartLimit int `json:"restartLimit,omitempty"`
// Volumes defines the shared volumes for job.
Volumes []corev1.Volume `json:"volumes,omitempty"`
// leader defines learner and manger pod
// +kubebuilder:validation:Required
Leader Leader `json:"leader,omitempty"`
//worker defines actor set
// +kubebuilder:validation:Required
WorkerSets []WorkerSet `json:"workerSets,omitempty"`
// CleanPodPolicy defines the policy to clean pods after TYJob completed.
// +kubebuilder:default=All
// +kubebuilder:validation:Enum=Running;All;None
CleanPodPolicy CleanPodPolicy `json:"cleanPodPolicy,omitempty"`
// handle terminate.
//+kubebuilder:default=false
Terminating bool `json:"terminating,omitempty"`
// MinWorkersNum defines the minimum num of workers to start the job
//+kubebuilder:default=1
MinWorkersNum int `json:"minWorkersNum,omitempty"`
//Priority defines the priority of the job
//+kubebuilder:default=5
//+kubebuilder:validation:Minimum=1
//+kubebuilder:validation:Maximum=10
Priority int `json:"priority,omitempty"`
SchedulerPolicy Policy `json:"schedulerPolicy,omitempty"`
}
type Policy struct {
//JobQueuePolicy defines the schedule policy among jobs
JobQueuePolicy JobQueuePolicy `json:"jobQueuePolicy,omitempty"`
//BasicPolicy defines the schedule policy of one job
BasicPolicy BasicPolicy `json:"basicPolicy,omitempty"`
}
type JobQueuePolicy string
const (
PriorityPolicy JobQueuePolicy = "Priority"
DRFPolicy JobQueuePolicy = "DRF"
)
type BasicPolicy string
const (
GangPolicy BasicPolicy = "Gang"
BinPackPolicy BasicPolicy = "BinPack"
LeaderFirstPolicy BasicPolicy = "LeaderFirst"
MinFragmentPolicy BasicPolicy = "MinFragment"
JobAffinityPolicy BasicPolicy = "JobAffinity"
JobAntiAffinity BasicPolicy = "JobAntiAffinity"
)
type CleanPodPolicy string
const (
// CleanPodPolicyRunning means deleting all running pods of the job after completed
CleanPodPolicyRunning CleanPodPolicy = "Running"
// CleanPodPolicyAll means deleting all pods of the job after completed
CleanPodPolicyAll CleanPodPolicy = "All"
// CleanPodPolicyNone means never deleting any pods of the job after completed
CleanPodPolicyNone CleanPodPolicy = "None"
)
type Leader struct {
// +kubebuilder:validation:Required
Name string `json:"name,omitempty"`
// Template defines the learner pod for TYJob.
// +kubebuilder:validation:Required
Template corev1.PodTemplateSpec `json:"template,omitempty"`
}
type WorkerSet struct {
// +kubebuilder:validation:Required
Name string `json:"name,omitempty"`
// Template defines the actor pod for TYJob.
// +kubebuilder:validation:Required
Template corev1.PodTemplateSpec `json:"template,omitempty"`
// Counts defines the number of workers in workSet.
// +kubebuilder:default=1
// +kubebuilder:validation:Minimum=1
Counts int `json:"counts,omitempty"`
}
Controller控制TYJob的生命周期,TYJob的状态Stage设计如下:
type Stage string
const (
// JobPending means the job has been submitted to the cluster,
JobPending Stage = "Pending"
// JobStarting means the leader has been created and waits for creating workers(writing env -> leader ip)
JobStarting Stage = "Starting"
// JobRunning means all the pods are in running state
JobRunning Stage = "Running"
// JobRescheduling means the job has been rescheduled and waits for restarting.
JobRescheduling Stage = "Rescheduling"
// JobSucceeded means job completed without error
JobSucceeded Stage = "Succeeded"
// JobFailed means some pods failed, job is also considered failed
JobFailed Stage = "Failed"
)
Scheduler控制TYJob的调度阶段,调度阶段设计如下:
type ScheduleState string
const (
JobUnscheduled ScheduleState = "Unscheduled"
JobScheduledSucceed ScheduleState = "ScheduledSucceed"
JobScheduledFailed ScheduleState = "ScheduledFailed"
JobScheduledPartly ScheduleState = "ScheduledPartly"
)
Controller
简介
Arranger Controller负责管理Job的生命周期即Stage, 包括Pending,Starting,Running,Succeed,Failed, 同时负责状态中Leader和Worker的创建及删除。在一次Reconciler中, Controller获取触发Reconciler的Job对象,检查声明资源的合法性并进行初始化, 继而根据当前的Stage和调度阶段进行状态转移,最后更新Status,Stage,Workers,结束此次Reconciler
工作流
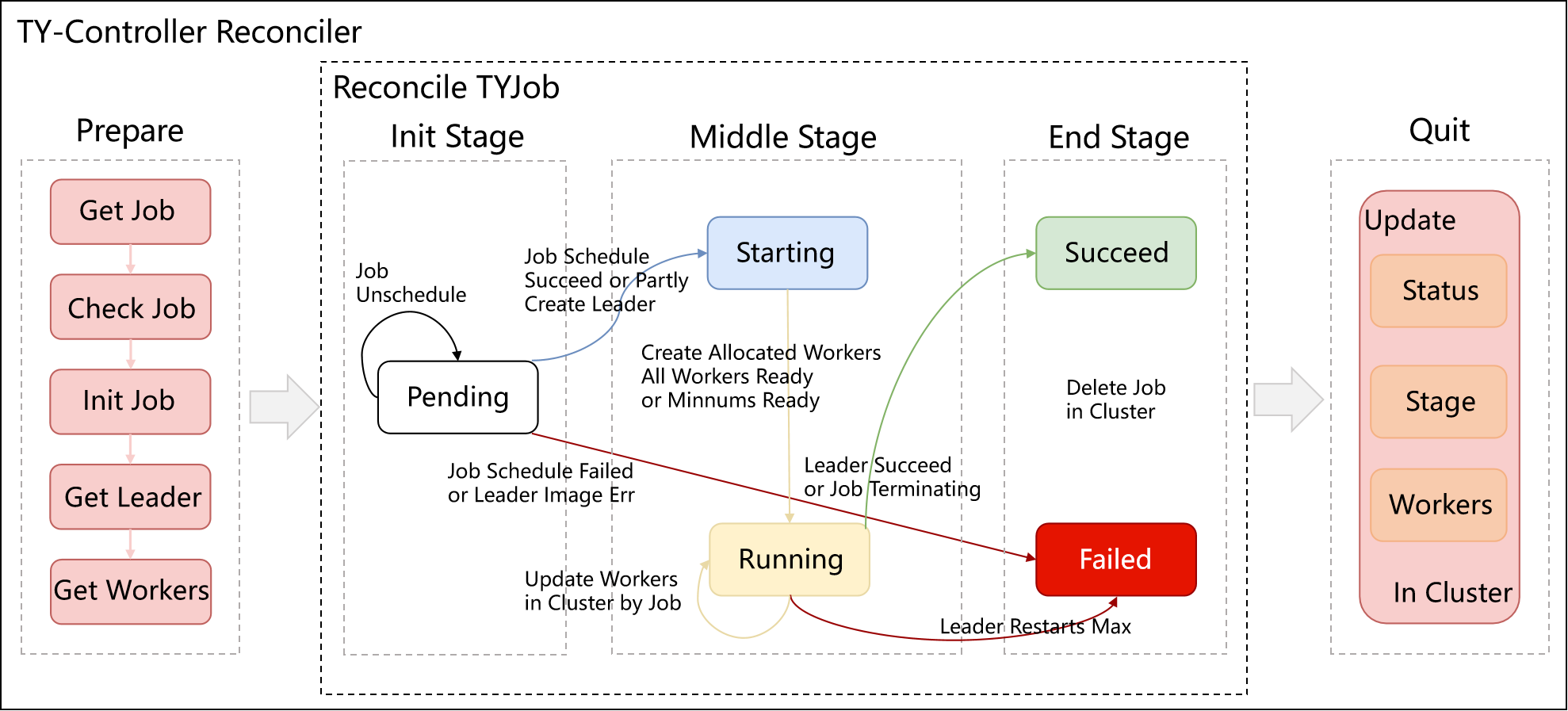
Arranger Controller工作流程如下:
获取用户提交的Job,检查合法性并初始化
状态转移
TYJob初次提交时处于Pending阶段
若此时的调度阶段处于UnScheduled,保持Pending状态
若此时的调度阶段处于ScheduledPartly或ScheduledScuueed阶段,创建Leader,Job进入Starting状态
若此时的调度阶段处于ScheduledFailed阶段,进入Failed状态
Starting阶段会创建所有已有调度结果的Worker,当所有或最小需要的Worker都处于Ready状态时Job进入Running状态
Running阶段会尝试创建未创建的Worker(若存在)
当Leader Succeed或Job Terminating时,Job进入Succeed状态
当Leader重启次数超过最大重启次数时,Job进入Failed状态
Job到达Succeed或Failed状态后会清空所有Pod资源,任务结束
3.更新Status,Stage,Workers,结束本次Reconciler
Scheduler
简介
Arranger Scheduler负责调度job和pod, 两种调度均支持多种调度策略。在一次Reconciler中, Scheduler先判断是否到达调度周期。若到达,则准备调度需要的Jobs及Nodes信息。 Job Queue会依Job调度策略对Job进行排序,再依次处理Job中的Pod。 Job根据其中Pods的调度阶段确定本身的调度阶段, 包括Unscheduled,ScheduledSucceed,ScheduleFailed,ScheduledPartly, Scheduler会尝试为处于后两个调度阶段的job中的未调度pod进行调度, 并将结果写入TYJob.status.Allocations中以供Controller使用。
工作流
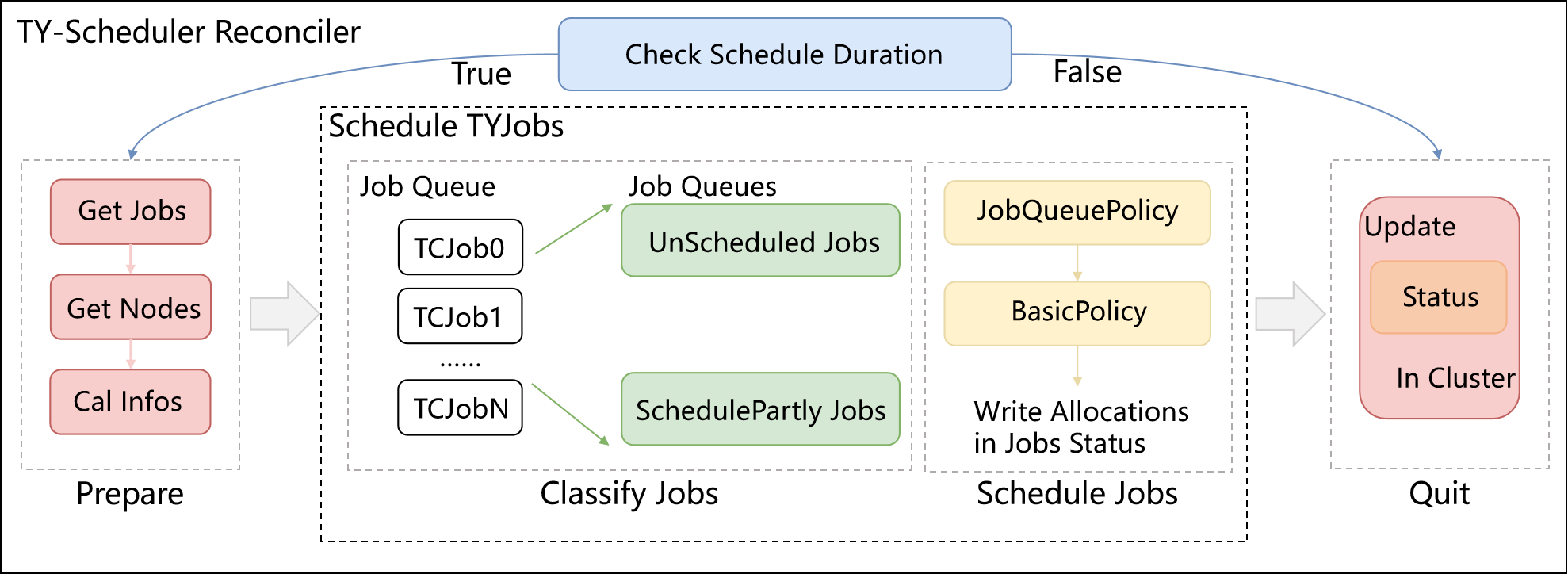
Arranger Scheduler工作流程如下:
周期性地开启调度
获取用户提交的Job和节点信息
将Job按调度阶段分类
根据JobQueuePolicy对Job Queue进行排序,再根据BasicPolicy对Job中的Pod进行调度,找到当前策略下得分最高的节点,保存该结果
更新Status,结束本次Reconcile
JobQueuePolicy
Arranger支持在一个调度周期中对多job任务进行调度, 这些job会根据其中任务的调度情况打上调度阶段标签, 所有待调度Job将根据JobQueuePolicy进行排序,以下为目前支持的策略:
PriorityPolicy
根据 JobQueue 中每个 Job.Spec.Priority 的值对 Queue 中所有Job排序,确定被 Scheduler 调度的先后顺序
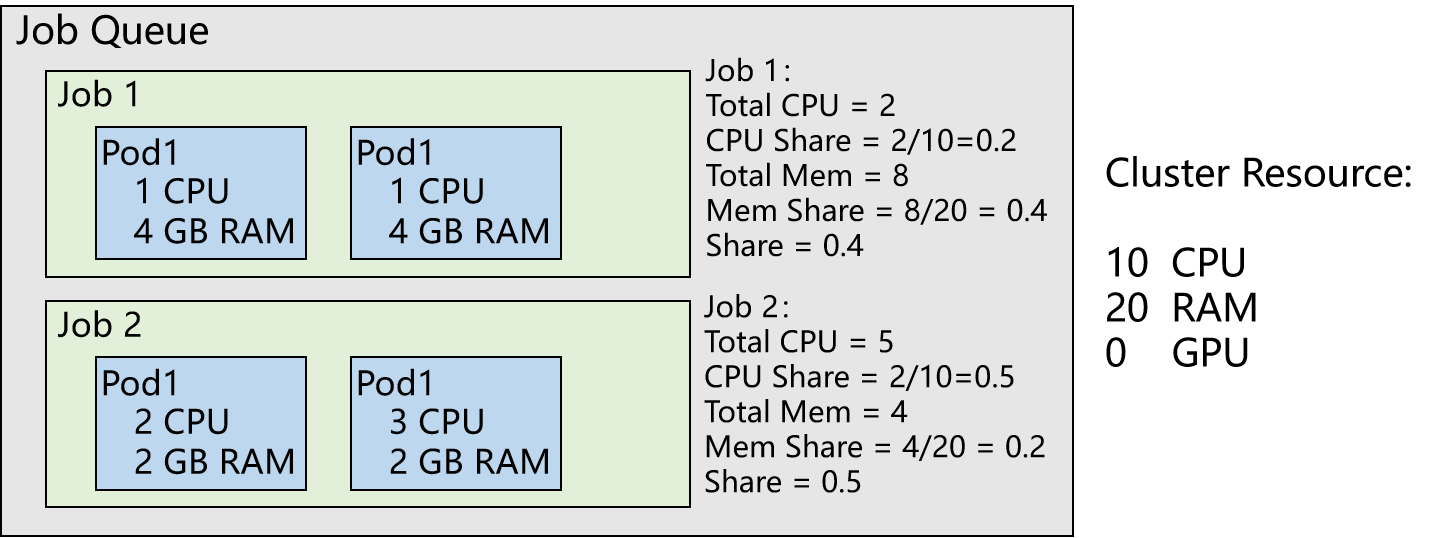
DRFPolicy
Dominant Resource Fairness,Scheduler根据Job的主导资源,计算Job的share值,在调度的过程中,具有较低share值的Job将具有更高的调度优先级
BasicPolicy
在对单个pod进行调度时,Arranger对所有能够满足需要资源的节点按一定标准进行打分, 将pod调度到得分最高的节点上,以下为目前支持的策略:
Binpack policy
目标是尽量把已有的节点填满(尽量不往空白节点分配)。具体实现上,Binpack调度算法是给可以投递的Nodes打分,分数越高表示节点的资源利用率越高,将应用负载靠拢在部分Nodes
LeaderFirst policy
目标是将 Learner 调度到资源利用率较低的Node,保障Learner 的 正常运行;Actor 则调度到资源利用率较大的Node,节约部分资源。Leader GPU 权重提高,选分数低的节点,Worker CPU 权重提高,选分数高的节点
MinFragmen policy
目标是减少集群节点的资源碎片率。碎片率:{ 1 - Abs[ CPU(Request / Allocatable) - Mem(Request / Allocatable)] } * Score。是用来考虑 CPU 的使用比例和内存使用比例的差值。如果这个差值越大,就表示碎片越大,Worker 优先不分配到这个节点上;如果这个差值越小,就表示这个碎片率越小,Worker优先分配到这个节点上
JobAffinity Policy
目标是尽量将一个 Job 的 Pods 调度到一个节点, 集中负载
JobAntiAffinity
目标是尽量将一个 Job 的 Pods 打散到不同节点,平坦负载